Walli
Versatile Mars Rover for University Rover Challenge.
Software Team Member
August 2023 - Now
RoboNav - RoboJackets
Project Robot C++ Python ROS
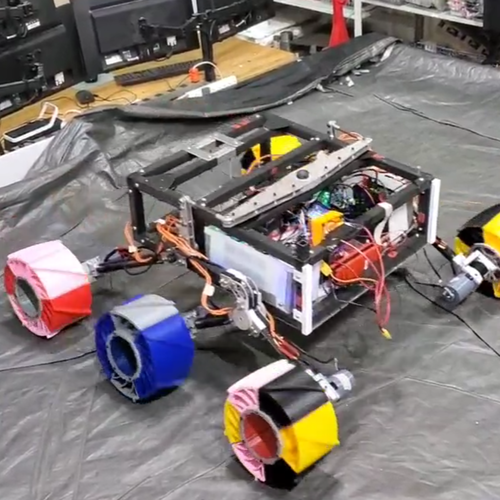
Walli is a Mars-Rover style robot I participated in building and programming as a software team member. Walli is designed to finish versatile tasks with its differential drive base and the Robotics arm equipped on it.
Innovations
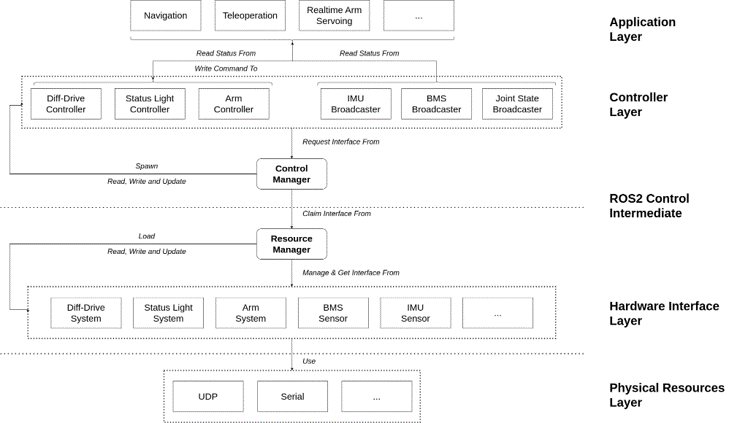
ROS2 Control Stack
The base drive of the whole robot is based on ROS2 Control - a generic, simple, and universal driver system for ROS. This system divides up hardware and software via two concepts - hardware interface and controllers, so the development of hardware drivers can be decoupled from the development of control algorithms.
I lead the refactoring and integration using ROS2 Control with other team members. Most of the changes are visible in Pull Request #149 and Pull Request #155.
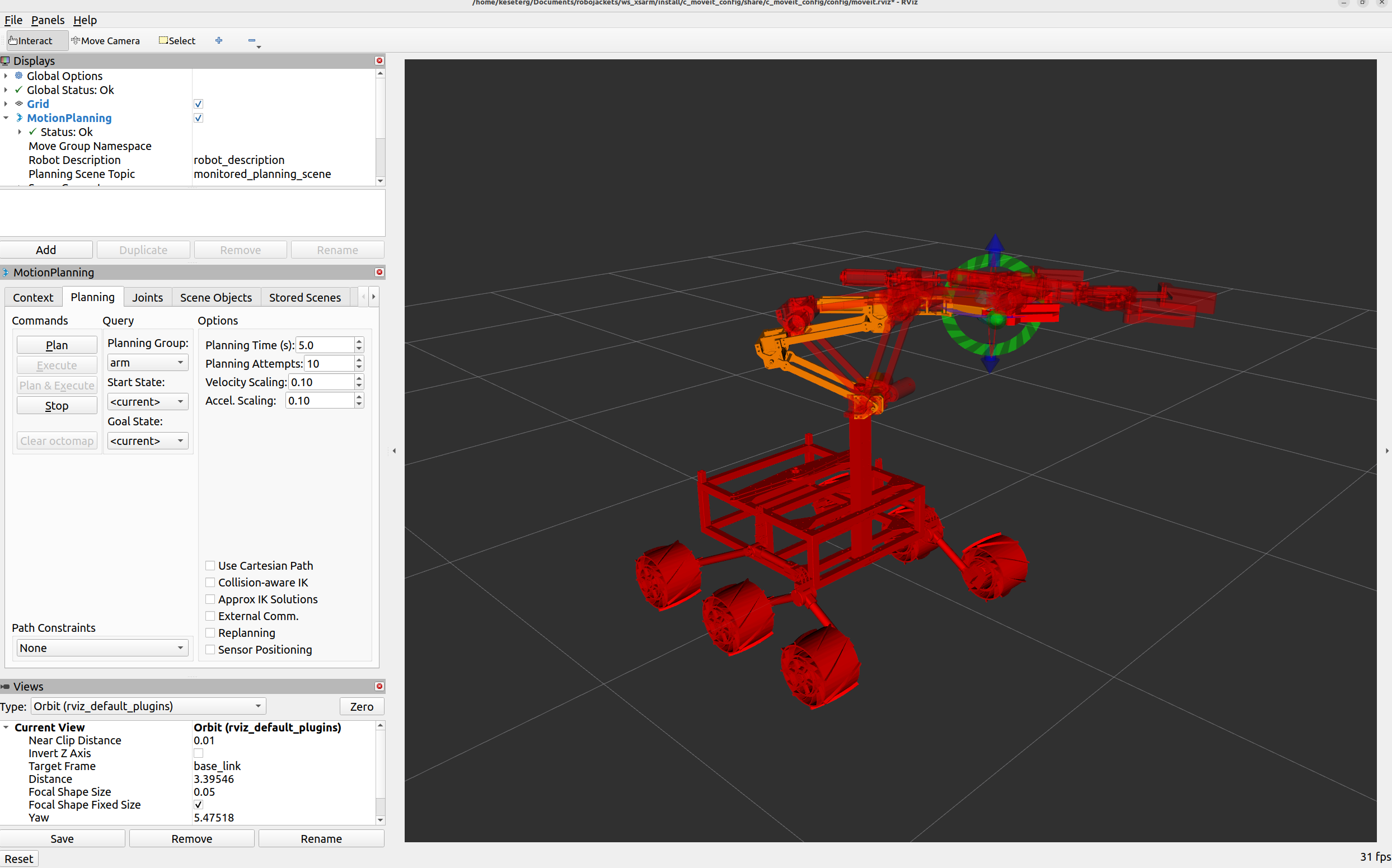
MoveIt!2 Robotics Arm Control
Using MoveIt!2 and the move group tools provided, I'm able to plan the move of Walli's robotics arm in 3d space. At the same time, with the support of real-time servoing programs, the arm is able to be tele-operated.